

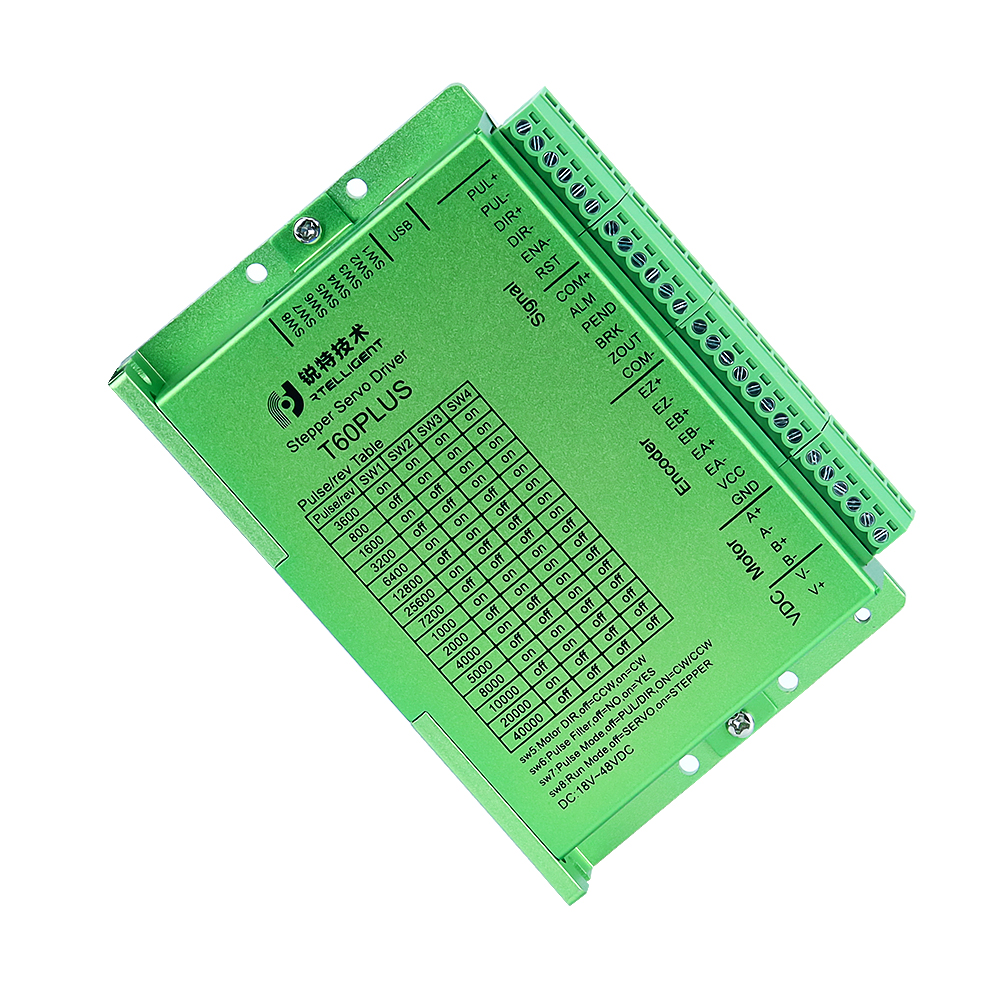
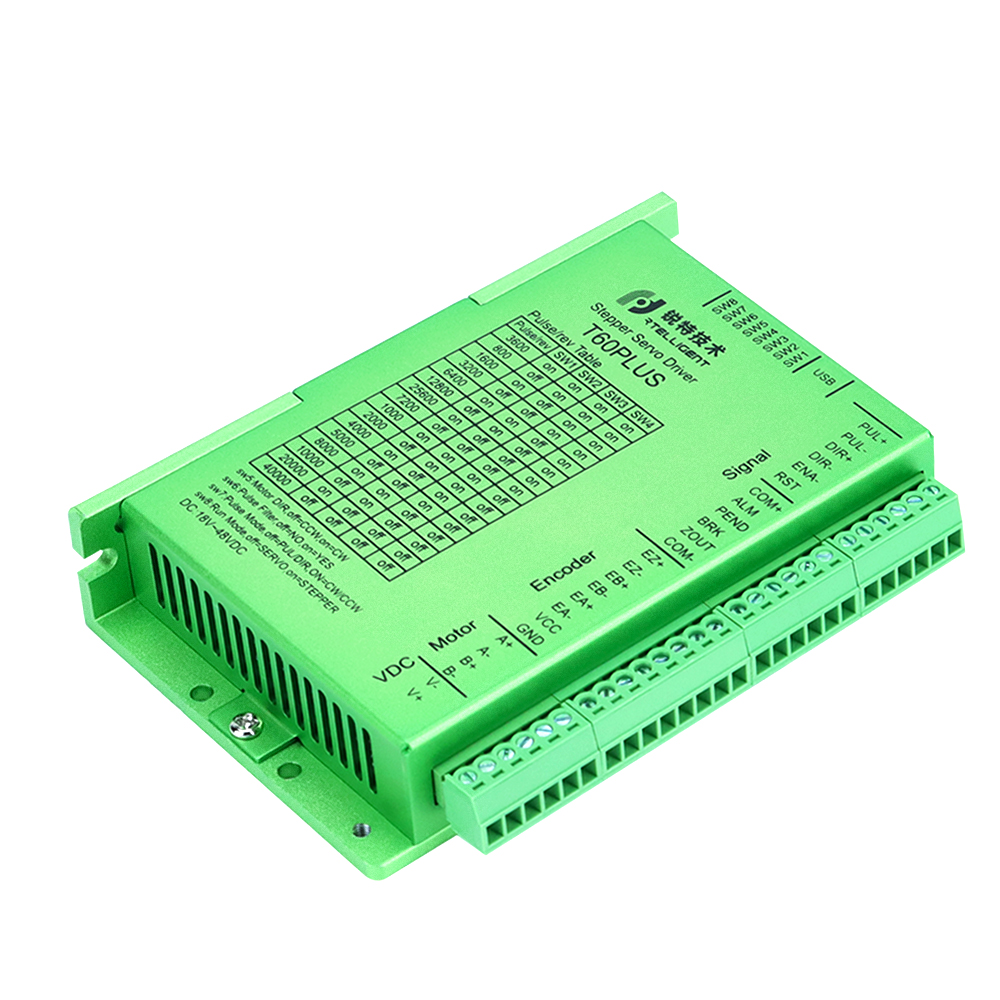


Pulssiohjattu 2-vaiheinen suljetun silmukan askelmoottori T60Plus


Tuotteen esittely



Yhteys

Ominaisuudet
| Virtalähde | 18–48 VDC |
| Ohjaustarkkuus | 4000 pulssia/r |
| Pulssitila | Suunta ja pulssi, myötä-/vastapäivään kaksoispulssi, A/B-kvadratuuripulssi |
| Virransäätö | Servovektoriohjausalgoritmi |
| Alajakoasetus | DIP-kytkimen asetus, 15 vaihtoehtoa (tai virheenkorjausohjelmiston asetus) |
| Nopeusalue | Perinteinen 1200–1500 rpm, jopa 4000 rpm |
| Resonanssin vaimennus | Resonanssipisteen automaattinen laskenta keskitaajuisen värähtelyn vaimentamiseksi |
| PID-parametrien säätö | Virheenkorjausohjelmisto moottorin PID-ominaisuuksien säätämiseen |
| Pulssisuodatin | 2 MHz:n digitaalinen signaalisuodatin |
| Hälytyslähtö | Hälytyslähtö ylivirralle, ylijännitteelle, asentovirheelle jne. |
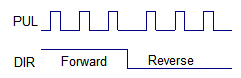
Pulssitila
T-sarjan vakiokäytön signaaliliitäntä on pulssimuotoinen, ja T60PLUS V3.0 voi vastaanottaa kolmenlaisia pulssikomentosignaaleja.
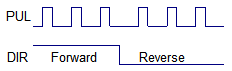
| Pulssi ja suunta (PUL + DIR) |
|
| Kaksoispulssi (myötäpäivään + vastapäivään) |
|
| Ortogonaalinen pulssi (A/B-ortogonaalinen pulssi) | 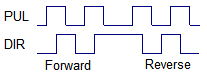 |
Mikroaskellusasetus
| Pulssi/kierros | SW1 | SW2 | SW3 | SW4 | Huomautuksia |
| 3600 | on | on | on | on | DIP-kytkin käännetään asentoon ”3600” ja testausohjelmisto voi vapaasti muuttaa muita osa-alueita. |
| 800 | pois | on | on | on | |
| 1600 | on | pois | on | on | |
| 3200 | pois | pois | on | on | |
| 6400 | on | on | pois | on | |
| 12800 | pois | on | pois | on | |
| 25600 | on | pois | pois | on | |
| 7200 | pois | pois | pois | on | |
| 1000 | on | on | on | pois | |
| 2000 | pois | on | on | pois | |
| 4000 | on | pois | on | pois | |
| 5000 | pois | pois | on | pois | |
| 8000 | on | on | pois | pois | |
| 10000 | pois | on | pois | pois | |
| 20000 | on | pois | pois | pois | |
| 40000 | pois | pois | pois | pois |
Mikroaskellusasetus
Aseman navat palaneet?
1. Jos liittimien välillä on oikosulku, tarkista, onko moottorin käämit oikosulussa.
2. Jos napojen välinen sisäinen vastus on liian suuri, tarkista se.
3. Jos johtojen väliseen liitokseen lisätään liikaa juotetta juotospallon muodostamiseksi.
Onko suljetun silmukan askelmoottorissa hälytys?
1. Jos enkooderin johdotuksessa on kytkentävirhe, varmista, että käytät oikeaa enkooderin jatkokaapelia tai ota yhteyttä Rtelligentiin, jos et voi käyttää jatkokaapelia muista syistä.
2. Tarkista, onko kooderi vaurioitunut, kuten signaalilähtö.
-
 Intelligent T60PLUS V3.0 Käyttöohje
Intelligent T60PLUS V3.0 Käyttöohje




